Howdy, Stranger!
It looks like you're new here. If you want to get involved, click one of these buttons!
The moon fountain was moved! Why?

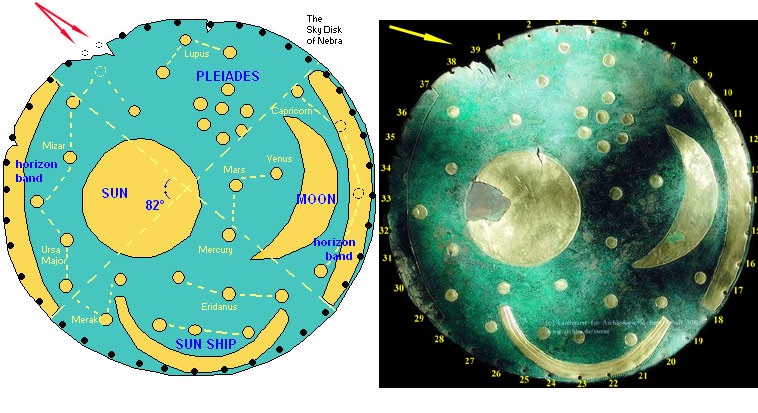
I ran into the Nebra Sky Disk and since and immediately thought of Ed's Moon Fountain because I been wondering about the raised, comma shaped edge on one side.

I'm not sure there is any correlation but it's interesting. So, while studying the fountain, I noticed that it has been moved, or rather; rotated!
the Moon Fountain now. Using he space between the twin moons as pointers, the fountain is facing northeast

Here is an image of Ed with his Book in Every Home. Here, the fountain is facing southeast
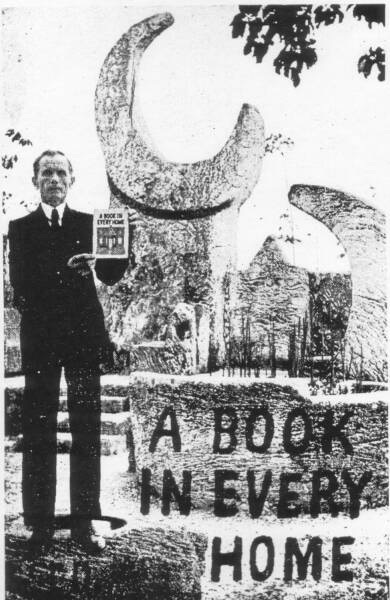
And another with the Obolisk behind it
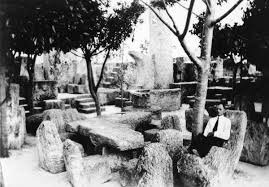
And one more

What's it all mean? I have no idea. I'm not sure the Nebra Skydisk and Moon Fountain are related but since it is believed that the comma shaped objects on either side of the disk represent land mass, I have to wonder if the raised edge on Ed's fountain doesn't represent the same...or at least a point of reference of what direction to face. If so, why the change?
I'm not sure there is any correlation but it's interesting. So, while studying the fountain, I noticed that it has been moved, or rather; rotated!
the Moon Fountain now. Using he space between the twin moons as pointers, the fountain is facing northeast
Here is an image of Ed with his Book in Every Home. Here, the fountain is facing southeast
And another with the Obolisk behind it
And one more
What's it all mean? I have no idea. I'm not sure the Nebra Skydisk and Moon Fountain are related but since it is believed that the comma shaped objects on either side of the disk represent land mass, I have to wonder if the raised edge on Ed's fountain doesn't represent the same...or at least a point of reference of what direction to face. If so, why the change?
Powered by leedskalnin.com & buzzdev.net
Comments